理论力学
参考书籍:
- 朗道,栗弗席兹,《力学(第3版)》(英文影印版),世界图书出版公司
- 朗道十卷本理论物理教程之首。从分析力学讲起,高屋建瓴,推理严密,内容精炼(170页)。可供仔细研读,若感觉难度太高可结合鞠国兴《朗道力学解读》。
- Goldstein et al.,《经典力学(第3版)》(英文影印版),高等教育出版社
- 美国普遍采用的理论力学教材,内容丰富,数学推导详尽,有大量习题。内容略多(约630页)。可供选择性阅读,与教材互补。中译本为第2版,内容更加简练,比第3版缺少“混沌”一章。
- Arnold,《经典力学的数学方法》(英文影印版),世界图书出版公司
- 经典名著,内容有深度,数学要求略高。可供查阅。
- 陈滨,《分析动力学(第2版)》,北京大学出版社
- 力学专业教材,对分析力学进行了细致、深入、大量的讨论。可供参考。
目录
质点力学
运动学
- 运动学变量的矢量表示:坐标 $ \begin{align}\boldsymbol{r}\end{align} $,速度 $ \boldsymbol{v}=\dot{\boldsymbol{r}} $,加速度 $ \boldsymbol{a}=\dot{\boldsymbol{v}}=\ddot{\boldsymbol{r}} $,动量 $ \boldsymbol{p}=m\boldsymbol{v} $,角动量 $ \boldsymbol{J}=\boldsymbol{r}\times\boldsymbol{p} $
- 三种坐标系中运动学变量的具体形式(注意:坐标轴方向是否随时间变化)
- 笛卡尔坐标系 $ \begin{align}\left\{\begin{array}{l} \boldsymbol{r}=x\boldsymbol{i}+y\boldsymbol{j}+z\boldsymbol{k},\\ \boldsymbol{v}=\dot x\boldsymbol{i}+\dot y\boldsymbol{j}+\dot z\boldsymbol{k},\\ \boldsymbol{a}=\ddot x\boldsymbol{i}+\ddot y\boldsymbol{j}+\ddot z\boldsymbol{k}, \end{array}\right.\end{align} $
- 平面极坐标系 $ \begin{align}\left\{\begin{array}{l} \boldsymbol{r}=r\boldsymbol{i},\\ \boldsymbol{v}=\dot r\boldsymbol{i}+r\dot \theta\boldsymbol{j},\\ \boldsymbol{a}=(\ddot r-r\dot\theta^2)\boldsymbol{i}+\frac{1}{r}\frac{\rm d}{{\rm d}t}(r^2\dot\theta)\boldsymbol{j}, \end{array}\right. \hspace{7ex} \left\{\begin{array}{l} \frac{{\rm d}\boldsymbol{i}}{{\rm d}t}=\dot\theta \boldsymbol{j},\\ \frac{{\rm d}\boldsymbol{j}}{{\rm d}t}=-\dot\theta \boldsymbol{i},\end{array} \right. \end{align} $
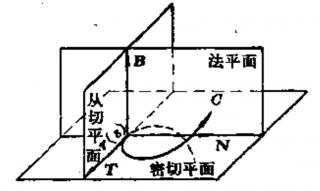
- 自然坐标系 $ \begin{align}\left\{\begin{array}{l} \boldsymbol{r}=\boldsymbol{r},\\ \boldsymbol{v}=\dot s\boldsymbol{i},\\ \boldsymbol{a}=\dot v\boldsymbol{i}+\frac{v^2}{\rho}\boldsymbol{j}=a_{\rm t}\boldsymbol{i}+a_{\rm n}\boldsymbol{j}, \end{array}\right. \hspace{7ex} \left\{\begin{array}{l} \frac{{\rm d}\boldsymbol{i}}{{\rm d}t}=\frac{v}{\rho} \boldsymbol{j},\\ \frac{{\rm d}\boldsymbol{j}}{{\rm d}t}=-\frac{v}{\rho} \boldsymbol{i},\end{array} \right. \end{align} \hspace{7ex} \rho=\left|\frac{{\rm d}s}{{\rm d}\theta}\right|=\left|\frac{y^{\prime\prime}}{\left(1+y^\prime\right)^{3/2}}\right| $
- 三维欧式空间微分几何(参考苏步青《微分几何学》)
- $ \boldsymbol{i}=\boldsymbol{e}_{\rm t} $:切向单位矢量,t=tangent(切向);
- $ \boldsymbol{j}=\boldsymbol{e}_{\rm n} $:法向单位矢量,n=normal(法向);
- $ \boldsymbol{k}=\boldsymbol{e}_{\rm b} $:从法向单位矢量,b=binormal(从法向/副法向)。
- 扩展:球坐标、抛物线坐标、椭圆坐标(见周衍柏第 $ \S5.10 $ 节)

质点运动定律
- 牛顿三定律
- 质点不受其他物体作用 $ \Longrightarrow {\it p}= $ 常数
- $ \boldsymbol{F}=m\boldsymbol{a} $
- $ \boldsymbol{F}_{12}=-\boldsymbol{F}_{21},\boldsymbol{r}_{12}\times\boldsymbol{F}_{12}=0 $
- 质点运动微分方程:
- 自由粒子运动微分方程: $ m\ddot{\boldsymbol{r}}=\boldsymbol{F}(\boldsymbol{r},\dot{\boldsymbol{r}},t) $
分量形式笛卡尔系 平面极坐标系 自然坐标系 $ \begin{align}\left\{\begin{array}{l} m\ddot{x}=F_x(x,y,z;\dot x,\dot y,\dot z;t)\\ m\ddot{y}=F_y(x,y,z;\dot x,\dot y,\dot z;t)\\ m\ddot{z}=F_z(x,y,z;\dot x,\dot y,\dot z;t) \end{array}\right.\end{align} $ $ \begin{align}\left\{\begin{array}{l} m(\ddot r-r{\dot\theta}^2)=F_r(r,\theta;\dot r,\dot\theta;t),\\ m(r\ddot\theta +2\dot r \dot\theta)=F_\theta(r,\theta;\dot r,\dot\theta;t),\\ \end{array}\right.\end{align} $
$ \begin{align}\left\{\begin{array}{l} m\dot v=F_{\rm t},\\ m\frac{v^2}{\rho}=F_{\rm n},\\ 0=F_{\rm b}. \end{array}\right.\end{align} $
- 非自由粒子运动微分方程:$ \begin{align}\left\{\begin{array}{l}m\ddot{\boldsymbol{r}}=\boldsymbol{F}(\boldsymbol{r},\dot{\boldsymbol{r}},t)+\boldsymbol{R},\\ \varphi(\boldsymbol{r})=0~~~(约束方程)\end{array}\right.\end{align} $
分量形式(将$ \boldsymbol{F}\to \boldsymbol{F}+\boldsymbol{R} $) 自然坐标系:$ \begin{align}\left\{\begin{array}{l} m\dot v=F_{\rm t},\\ m\frac{v^2}{\rho}=F_{\rm n}+R_{\rm n},\\ 0=F_{\rm b}+R_{\rm b},\\ \varphi(\boldsymbol{r})=0. \end{array}\right.\end{align} $
- 自由粒子运动微分方程: $ m\ddot{\boldsymbol{r}}=\boldsymbol{F}(\boldsymbol{r},\dot{\boldsymbol{r}},t) $
- 求解质点运动 $ \to $ 求解二阶线性/非线性常微分方程 两种解法:(1)数值解法(差分法,适用于线性/非线性、一阶/二阶/高阶、常微分/偏微分等各种方程);(2)解析法
质点运动定理
- 保守力:如果 $ \boldsymbol{F}(\boldsymbol{r}) $ 做功与路径无关,只依赖于出发点和终点坐标,则 $ \boldsymbol{F}(\boldsymbol{r}) $ 叫保守力。
- 数学表述:曲线积分 $ \oint_A^B \boldsymbol{F}(\boldsymbol{r})\cdot{\rm d}\boldsymbol{r} $ 与路径无关,而仅依赖于端点 A 和 B .
- 根据高数知识,必然存在标量函数 $ V(\boldsymbol{r}) $ 满足 $ \boldsymbol{F}(\boldsymbol{r})=-\nabla V(r) $
- 物理上,标量函数 $ V(\boldsymbol{r}) $ 为保守力 $ \boldsymbol{F}(\boldsymbol{r}) $ 对应的势能。
- 保守力:conservative force,原始意义是保持系统能量守恒(conserved)的作用力。(见朗道第 $ \S6 $ 节)
- 质点运动定理和守恒定律
- 动量定理:$ \dot{\boldsymbol{p}}=\boldsymbol{F} $或$ {\rm d}\boldsymbol{p}={\rm d}\boldsymbol{F}{\rm d}t $;动量守恒定律:$ \boldsymbol{F}=0\Longrightarrow\boldsymbol{p}= $常数
- 角动量定理:$ \dot{\boldsymbol{J}}=\boldsymbol{M} $或$ {\rm d}\boldsymbol{J}=\boldsymbol{M}{\rm d}t $;角动量守恒定律:$ \boldsymbol{M}=0\Longrightarrow \boldsymbol{J}= $常数
- 动能定理:$ \nabla T=\boldsymbol{F} $或$ {\rm d}T=\boldsymbol{F}\cdot{\rm d}\boldsymbol{r} $ (动能 $ T\equiv \frac{1}{2}mv^2 $);机械能守恒定律:$ \boldsymbol{F} $ 为保守力 $ \Longrightarrow E= $常数 (总能量 $ E=T+V $)
有心力
- 质点在有心力场中运动 $ \Longrightarrow $ 角动量守恒($ \dot{\boldsymbol{J}}=0 $)$ \Longrightarrow $ 平面运动
- 有心力必定为保守力,$ \boldsymbol{F}=-\nabla U(r) $,其中 $ U(r) $ 为势能
- 质点在有心力场中的运动等价于一维运动:$ m\ddot r=-\nabla V(r) $$ ~~~~~\left(V(r)=U(r)+\frac{\boldsymbol{J}^2}{2mr^2}\right) $
- 轨道有限的条件:有效势能$ V(r) $存在势阱,能量$ E $小于势阱两边势垒的高度,从而质点能够束缚在势阱中运动。
假设势能取幂函数形式,$ U(r)=cr^\alpha $,根据上述条件有$ V^\prime(r)=0,V^{\prime\prime}(r)>0 $,从而得到轨道有限的必要条件为$ \begin{align}\left\{\begin{array}{ll} c>0,&\alpha>0,\\ c<0,&-2<\alpha<0 \end{array}\right.\end{align} $ - 质点在有心力场中运动的轨道封闭的条件:$ \Delta\theta=2\int_{r_{\rm min}}^{r_{\rm max}}\frac{J/r^2{\rm d}r}{\sqrt{2m(E-V(r))}}=\pi \times $有理数
- 圆形轨道的稳定性:从等效一维运动的角度讨论,稳定性意味着粒子束缚在一个势阱中运动。因此稳定性条件与前边的有限性条件相同。
- 万有引力(平方反比引力)作用下运动方程的解:$ r=\frac{p}{1+e\cos\theta}.\hspace{3ex}\left(p=\frac{J^2}{mk^2},e=\sqrt{1+\frac{2EJ^2}{mk^4}}\right) $
- 平方反比斥力:$ \alpha $ 粒子的散射,运动方程的解为 $ r=\frac{p}{e\cos\theta-1}.\hspace{3ex}\left(p=\frac{J^2}{mk^2},e=\sqrt{1+\frac{2EJ^2}{mk^4}}\right) $.
- 扩展(SRT和毕业论文候选)
- 双恒星系统中行星的轨道?居住在星星上的人的历法会如何发展?
质点组力学
质点组动力学
- 运动学:
- 质点组总动量:$ \boldsymbol{P}=m\boldsymbol{v}_c+\boldsymbol{0} $
- 质点组角动量:$ \begin{align} \boldsymbol{J}=\boldsymbol{r}\times m\boldsymbol{v}_c+\boldsymbol{J}^\prime\end{align} $
- 质点组动能(柯尼希定理):$ \begin{align} T=\frac{1}{2}m\boldsymbol{v}_c^2+T^\prime\end{align} $,即$ \begin{align}\frac{1}{2}\sum_{i=1}^n m_i \dot{\boldsymbol{r}}_i^{2}=\frac{1}{2}m\dot{\boldsymbol{r}}_C^2+\frac{1}{2}\sum_{i=1}^n m_i \dot{\boldsymbol{r}}_i^{\prime 2}\end{align} $,其中 $ \begin{align} m=\sum_{i=1}^n m_i \end{align} $
- 动力学
- 质点组动量定理:$ \begin{align} {\rm d}\boldsymbol{p}=\left(\sum_{i=1}^n \boldsymbol{F}_i^{(\rm e)}\right){\rm d}t \end{align} $
- 质点组角动量定理:$ \begin{align} {\rm d}\boldsymbol{J}=\left(\sum_{i=1}^n \boldsymbol{M}_i^{(\rm e)}\right){\rm d}t \end{align} $
- 质点组动能定理:$ \begin{align} {\rm d}T=\sum_{i=1}^n \boldsymbol{F}_i^{(\rm e)}\cdot {\rm d}\boldsymbol{r}_i+\sum_{i=1}^n \boldsymbol{F}_i^{(\rm i)}\cdot {\rm d}\boldsymbol{r}_i \end{align} $
两体问题
两质点组成的系统,如果合外力为 0 即 $ 0=\boldsymbol{F}_1^{(\rm e)}+\boldsymbol{F}_2^{(\rm e)} $,对每个质点分别列运动方程:$ \begin{align}\left\{\begin{array}{l} m_1\ddot{\boldsymbol{r}}_1=\boldsymbol{F}_1^{(\rm e)}+\boldsymbol{F}_{21}^{(\rm i)},\\ m_2\ddot{\boldsymbol{r}}_2=\boldsymbol{F}_2^{(\rm e)}+\boldsymbol{F}_{12}^{(\rm i)}, \end{array}\right.\end{align} $ ,其中 $ \boldsymbol{F}_{21}^{(\rm i)}=-\boldsymbol{F}_{12}^{(\rm i)} $。
- 两式之和为质心运动微分方程:$ m\ddot{\boldsymbol{r}}_c=0,\hspace{2ex}\left(m=m_1+m_2\right) $
- 两式分别乘以 $ m_2 $ 和 $ m_1 $,相减得到:$ m_1m_2\left(\ddot{\boldsymbol{r}}_1-\ddot{\boldsymbol{r}}_2\right)=(m_1+m_2)\left(\boldsymbol{F}_1^{(\rm e)}+\boldsymbol{F}_{21}^{(\rm i)}\right) $,即 $ \mu\ddot{\boldsymbol{r}}=\boldsymbol{F}_1^{(\rm e)}+\boldsymbol{F}_{21}^{(\rm i)} $,其中 $ \boldsymbol{r}\equiv \boldsymbol{r}_1-\boldsymbol{r}_2 $为两质点的相对位矢, $ \mu\equiv \frac{m_1m_2}{m_1+m_2} $ 叫做折合质量。
如果两质点不受外力,且两质点相互作用力仅依赖于距离(是保守力),那么 $ \boldsymbol{F}_{21}^{(\rm i)}=-\nabla U(\boldsymbol{r}) $,$ \big(U(\boldsymbol{r}) $ 为两质点相互作用势能$ \big) $,上式可化为有心力场中的单质点运动问题 $ \begin{align} \mu \ddot{\boldsymbol{r}}=-\nabla U(\boldsymbol{r})\end{align} $。
简言之,不受外力的两质点的运动,可以等价为质心的匀速直线运动与具有折合质量的质点的相对运动的合成,运动方程分别为 $ \begin{align}\left\{\begin{array}{l} m\ddot{\boldsymbol{r}}_c=0,\\ \mu\ddot{\boldsymbol{r}}=-\nabla U(\boldsymbol{r}). \end{array}\right.\end{align} $
位力定理
对于满足坐标和动量均取有限值的运动(包括周期性运动),质点组动能的时间平均值等于位力积时间平均值的负值。即
$ \overline{T}=-\frac{1}{2}\overline{\sum_{i=1}^n\boldsymbol{F}_i\cdot\boldsymbol{r}_i} $
这个定理在统计力学和量子力学中有重要应用。更详细的讨论见 位力定理
刚体力学
刚体运动学
- 取固定在刚体上的三个相互垂直的轴为坐标轴,建立随刚体运动的坐标系$ o-xyz $。(注意:参考系一般选取地面静止系,与坐标系要区分开。)
刚体的位置可用欧拉角描述,他们分别为进动角 $ \varphi $、自转角 $ \psi $、章动角 $ \theta $ :
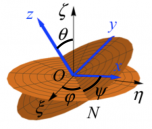
- 欧拉运动学方程:$ \begin{align}\left\{\begin{array}{l} \omega_x=\dot\varphi\sin\theta\sin\psi+\dot\theta\cos\psi,\\ \omega_y=\dot\varphi\sin\theta\cos\psi-\dot\theta\sin\psi,\\ \omega_z=\dot\varphi\cos\theta+\dot\psi, \end{array}\right.\end{align} $
上式来源于 $ \boldsymbol{\omega}=\dot\varphi\boldsymbol{e}_\zeta+\dot\theta\boldsymbol{e}_{ON}+\dot\psi \boldsymbol{e}_z $ 和刚体转动方向的三个单位矢量在刚体随动系中的表达式$ \begin{align}\left\{\begin{array}{l} \boldsymbol{e}_\zeta=\sin\theta\cos\varphi\boldsymbol{i}+\sin\theta\sin\varphi\boldsymbol{j}+\cos\theta\boldsymbol{k},\\ \boldsymbol{e}_{ON}=\cos\varphi\boldsymbol{i}+\sin\varphi\boldsymbol{j},\\ \boldsymbol{e}_z=\boldsymbol{k}, \end{array}\right.\end{align} $
刚体角速度为矢量,按照普通矢量相加 $ \boldsymbol{\omega}=\boldsymbol{\omega}_1+\boldsymbol{\omega}_2 $ - 刚体角动量为 $ \boldsymbol{J}=\hat{\boldsymbol{A}}\cdot\boldsymbol{\omega} $,在笛卡尔系中写为 $ \begin{align} \left(\begin{array}{l}J_x\\J_y\\J_z\end{array}\right) =\left(\begin{array}{rrr}I_{xx}&-I_{xy}&-I_{xz}\\-I_{yx}&I_{yy}&-I_{yz}\\-I_{zx}&-I_{zy}&I_{zz}\end{array}\right) \left(\begin{array}{l}\omega_x\\\omega_y\\\omega_z\end{array}\right)\end{align} $
刚体转动动能为 $ T=\frac{1}{2}\boldsymbol{\omega}\cdot \hat{\boldsymbol{A}}\cdot\boldsymbol{\omega}=\frac{1}{2}I_n\omega^2 $,其中 $ \vec\omega=\omega\hat e_n $,$ I_n\equiv \hat e_n\cdot\hat{\boldsymbol{A}}\cdot\hat e_n $ 为刚体相对于过质心且沿 $ \hat e_n $ 方向的轴的转动惯量。
空间转动变换,可以将转动惯量张量 $ \hat{\boldsymbol{A}} $ 对角化,此时的坐标轴为惯量主轴。
惯量主轴的求解:惯量椭球 $ \boldsymbol{r}\cdot\hat{\boldsymbol{A}}\cdot\boldsymbol{r}=1 $ 的三个对称轴。 - 刚体上任意一点的速度:$ \boldsymbol{ v}_A=\boldsymbol{ v}_O+\boldsymbol{\omega}\times\boldsymbol{ r}_{OA} $
- 刚体的动能有两部分组成:质心动能和转动动能,即$ T=\frac{1}{2}m\boldsymbol{v}_c^2+\frac{1}{2}I_n\omega^2 $

刚体动力学
刚体动力学方程包括刚体动量定理和刚体角动量定理(即欧拉动力学方程)。
- 刚体动量定理:$ m\ddot{\boldsymbol{r}}_c=\boldsymbol{F} $,刚体质心运动由刚体受到的合外力决定。
- 刚体角动量定理:$ \dot{\boldsymbol{J}}=\boldsymbol{M} $,其中角动量 $ \boldsymbol{J}=\hat{\boldsymbol{A}}\cdot\boldsymbol{\omega} $。为简化计算,欧拉采用了两重简化方式
- 采用固定在刚体上的坐标系,则转动惯量张量 $ {\rm d}\hat{\boldsymbol{A}}/{\rm d}t=0 $,角速度 $ \boldsymbol{\omega}=\omega_x\boldsymbol{i}+\omega_y\boldsymbol{j}+\omega_z\boldsymbol{k} $,其中坐标轴的单位矢量随时间变化,满足
$ \begin{align}\frac{{\rm d}^*\boldsymbol{J}}{{\rm d}t}+\boldsymbol{\omega}\times\boldsymbol{J}=\boldsymbol{M}.\end{align} $ - 取$ o-xyz $的坐标轴为刚体的惯量主轴,则惯量张量为对角矩阵即$ \begin{align}\hat{\boldsymbol{A}}=\left(\begin{array}{ccc} I_1 & 0 & 0\\ 0 & I_2 & 0\\ 0 & 0 & I_3 \end{array}\right)\end{align} $
因此角动量形式为 $ \begin{align}\boldsymbol{J}=\hat{\boldsymbol{A}}\cdot\boldsymbol{\omega}=I_1\omega_x\boldsymbol{i}+I_2\omega_y\boldsymbol{j}+I_3\omega_z\boldsymbol{k}\end{align} $。代入刚体角动量定理,其分量形式即为欧拉动力学方程
$ \begin{align}\left\{\begin{array}{l} I_1\dot\omega_x+(I_3-I_2)\omega_y\omega_z=M_x,\\ I_2\dot\omega_y+(I_1-I_3)\omega_z\omega_x=M_y,\\ I_3\dot\omega_z+(I_2-I_1)\omega_x\omega_y=M_z. \end{array}\right.\end{align} $ 刚体简单运动
- 平动
- 定轴转动
- 平面平行运动
刚体一般运动
- 定点转动的动力学和运动学方程
- 重刚体定点转动的解:欧拉-潘索情况
- 重刚体定点转动的解:拉格朗日-泊松情况
- 重刚体定点转动的解:C.B.柯凡律夫斯卡亚情况
- 拉莫尔进动
转动参考系
知识要点
- 平面转动参考系 $ \begin{align}\left\{\begin{array}{l} \boldsymbol{v}=\boldsymbol{v}^\prime+\boldsymbol{\omega}\times\boldsymbol{r},\\ \boldsymbol{a}=\boldsymbol{a}^\prime+\dot{\boldsymbol{\omega}}\times\boldsymbol{r}-\omega^2\boldsymbol{r}+2\boldsymbol{\omega}\times\boldsymbol{v}^\prime\\ ~~=\boldsymbol{a}^\prime+\boldsymbol{a}_{\rm t}+\boldsymbol{a}_{\rm c} \end{array}\right.\end{align} $
- 空间转动参考系$ \begin{align}\left\{\begin{array}{l} \boldsymbol{v}=\boldsymbol{v}^\prime+\boldsymbol{\omega}\times\boldsymbol{r},\\ \boldsymbol{a}=\boldsymbol{a}^\prime+\dot{\boldsymbol{\omega}}\times\boldsymbol{r}+\boldsymbol{\omega}(\boldsymbol{\omega}\cdot\boldsymbol{r})-\omega^2\boldsymbol{r}+2\boldsymbol{\omega}\times\boldsymbol{v}^\prime\\ ~~=\boldsymbol{a}^\prime+\boldsymbol{a}_{\rm t}+\boldsymbol{a}_{\rm c} \end{array}\right.\end{align} $
- $ \frac{{\rm d}\boldsymbol{G}}{{\rm d}t}=\frac{{\rm d}^*\boldsymbol{G}}{{\rm d}t}+\boldsymbol{\omega}\times\boldsymbol{G}, $
- 非惯性系动力学:将 $ \boldsymbol{a}_{\rm t} $ 和 $ \boldsymbol{a}_{\rm c} $ 的影响等价于惯性力 $ -m\boldsymbol{a}_{\rm t} $(惯性离心力)和 $ -m\boldsymbol{a}_{\rm c} $(科里奥利力)的作用。
- 上述两种力是否为保守力?
- 应用
- 地球自转对地表物体运动造成的影响
- 傅科摆
- 拓展
- 地漏涡旋方向与地球自转有无关联?
- 考虑表面完全被水覆盖的行星,自转对行星表面的水波有无影响?对行星尺度的水波有无影响?
- 木星是巨型气体行星,表面有大红斑。试分析木星自转在大红斑形成和演化过程中的影响?
分析力学
变分
变分计算
变分计算例子
拉格朗日方程
- 概念:约束、广义坐标 $ q_\alpha $、广义速度 $ \dot q_\alpha $、广义动量 $ p_\alpha=\begin{align}\frac{\partial T}{\partial \dot q_\alpha}\end{align} $、广义力 $ \begin{align} Q_\alpha=\sum_{i=1}^n\boldsymbol{F}_i\cdot\frac{\partial\boldsymbol{r}_i}{\partial q_\alpha}\end{align} $
- 虚功原理:力学系统平衡条件为 $ \begin{align} \delta W=\sum_{i=1}^n \boldsymbol{F_i}\cdot\delta\boldsymbol{r}_i=\sum_{\alpha=1}^s Q_\alpha \delta q_\alpha=0\end{align} $,其中 $ s=n-m $,$ m $ 是约束的个数。
- 拉格朗日未定乘子法:在约束 $ \begin{align} f_\beta(x_1,\ldots,x_n)=0,(\beta=1,2,\ldots,m)\end{align} $ 限制下求解具有 $ n $ 个自变量的函数 $ g(x_1,\ldots,x_n) $ 的极值,等价于求解具有 $ n+m $ 个自变量的函数$ \begin{align}g^\prime(x_1,\ldots,x_n;\lambda_1,\ldots,\lambda_m)=g(x_1,\ldots,x_n)+\sum_{\beta=1}^m \lambda_\beta f_\beta(x_1,\ldots,x_n)\end{align} $的极值。
- 拉格朗日方程
- 基本形式的拉格朗日方程:$ \begin{align}\frac{\rm d}{{\rm d}t}\left(\frac{\partial T}{\partial \dot q_\alpha}\right)-\frac{\partial T}{\partial q_\alpha}=Q_\alpha,~~~~~(\alpha=1,2,\ldots,s)\end{align} $
- 保守系的拉格朗日方程:$ \begin{align}\frac{\rm d}{{\rm d}t}\left(\frac{\partial L}{\partial \dot q_\alpha}\right)-\frac{\partial L}{\partial q_\alpha}=0,~~~~~(\alpha=1,2,\ldots,s)\end{align} $
- 上式应用了保守力性质 $ \begin{align}Q_\alpha=-\frac{\partial U(q)}{\partial q_\alpha}\end{align} $ 和重新定义的拉格朗日函数 $ \begin{align}L=T-U\end{align} $
- 循环坐标:如果$ \begin{align}\frac{\partial L}{\partial q_\alpha}=0,\end{align}<math>则<math>q_\alpha $是系统的循环坐标,对应的广义动量是守恒量:$ P_\alpha=\begin{align}\frac{\partial L}{\partial \dot q_\alpha}=\end{align}常数 $
- 能量积分
- 简单应用
小振动
- 平衡位置附近,有$ \begin{align}\left\{\begin{array}{l} V=\frac{1}{2}\sum_{\alpha,\beta=1}^s c_{\alpha\beta }q_\alpha q_\beta,\\ T=\frac{1}{2}\sum_{\alpha,\beta=1}^s a_{\alpha\beta} \dot q_\alpha\dot q_\beta, \end{array}\right.\end{align} $,解出$ \begin{align} q_\beta=\sum_{l=1}^s \Delta_{1\beta}(-\nu_l^2)\cos(\nu_l t+\varepsilon_l)\end{align} $
- 简正坐标:坐标变换,将 $ V $ 和 $ T $对角化,解出的 $ \xi_l=C_l\cos(\nu_lt+\varepsilon_l) $ 叫做简正坐标。
- 在理论物理中的应用
- 统计力学
- 量子力学
- 电动力学
哈密顿方程
- 勒让德变换:$ f(x,y) $ 对 $ x $ 的勒让德变换为 $ g(u,y)=ux-f,~~~\left(u=\frac{\partial f(x,y)}{\partial x}\Longrightarrow x=x(u,y)\right) $
- 哈密顿函数:$ \begin{align} H(p,q,t)=\sum_{i=1}^s p_\alpha\cdot q_\alpha-L\end{align} $
- 哈密顿正则方程:$ \begin{align}\left\{\begin{array}{l} \dot q_\alpha=\frac{\partial H}{\partial p_\alpha},\\ \dot p_\alpha=-\frac{\partial H}{\partial q_\alpha}, \end{array}\right.~~~~(\alpha=1,2,\ldots,s)\end{align} $
- 泊松括号定义:$ \begin{align} [A,B]=\sum_{\alpha=1}^s\left(\frac{\partial A}{\partial q_\alpha}\frac{\partial B}{\partial p_\alpha}-\frac{\partial A}{\partial p_\alpha}\frac{\partial B}{\partial q_\alpha}\right)\end{align} $,有$ \begin{align}\frac{{\rm d}\varphi}{{\rm d}t}=\frac{\partial \varphi}{\partial t}+[\varphi,H]\end{align} $
- $ \begin{align}\varphi=C\end{align} $ 是能量积分 $ \Longleftrightarrow $ $ \begin{align}0=\frac{\partial \varphi}{\partial t}+[\varphi,H]\end{align} $
- 泊松定理:如果 $ \varphi $ 和 $ \psi $ 是正则方程的积分,则 $ [\varphi,\psi] $ 也是正则方程的积分。
- 哈密顿原理:$ \begin{align}\delta\int_{t_1}^{t_2}L{\rm d}t=0\end{align} $
哈密顿方程求解的一般方法:哈密顿-雅可比理论
- 正则变换:保证哈密顿方程形式不变的坐标变换;
- 正则变换条件为 $ \begin{align} \sum_{\alpha=1}^s\left(p_\alpha{\rm d}p_\alpha-P_\alpha{\rm d}Q_\alpha\right)+(H^*-H){\rm d}t={\rm d}U\end{align} $
- 如果正则形式和 $ U $ 均不显含 $ t $,则正则变换条件变为 $ \begin{align} \sum_{\alpha=1}^s\left(p_\alpha{\rm d}p_\alpha-P_\alpha{\rm d}Q_\alpha\right)={\rm d}U\end{align} $,且 $ H^*=H $。
- 正则变换的关键在于确保变换后的力学系统含有尽可能多的循环积分。
- 最理想的情况,$ \begin{align} H^*=H^*(P_1,P_2,\ldots,P_\alpha,t) \end{align} $,则方程完全解出:$ P_\alpha= $常数,$ Q_\alpha=\int\frac{\partial H^*}{\partial P_\alpha}{\rm d}t,~~~(\alpha=1,2,\ldots,s) $
- 哈密顿-雅可比方程:选取母函数 $ S=U $ 使得变换后的哈密顿函数 $ H^*=0 $,则母函数的满足的方程为 $ \begin{align}\frac{\partial S}{\partial t}+H\left(t;q_1,q_2,\ldots,q_s;\frac{\partial S}{\partial q_1},\frac{\partial S}{\partial q_2},\ldots,\frac{\partial S}{\partial q_s}\right)=0\end{align} $
- 如果哈密顿函数不显含 $ t $ 且约束为稳定的,则 $ \begin{align}S=-Et+W(q_1,q_2,\ldots,q_s,\alpha_1,\alpha_2,\ldots,\alpha_s,E)+C\end{align} $,其中 $ W $ 叫做哈密顿-雅可比特性函数。哈密顿-雅可比方程变为
- $ \begin{align}H\left(q_1,q_2,\ldots,q_s,\frac{\partial W}{\partial q_1},\frac{\partial W}{\partial q_2},\ldots,\frac{\partial W}{\partial q_s}\right)=E,\end{align} $
- 分离变量法求解哈密顿-雅可比方程